4 bar linkage passing given 3 pts
given: the trace of point A, B (A1, A2, A3, B1, B2, B3)
 |
| Fig.1 |
How to find?
A0 is a circumcenter of A1A2A3
B0 is a circumcenter of B1B2B3
Then, we can make the 4-bar linkage
A0B0(fixed) - B0B1(input) - A1B1(coupler) - A1A0(follower)
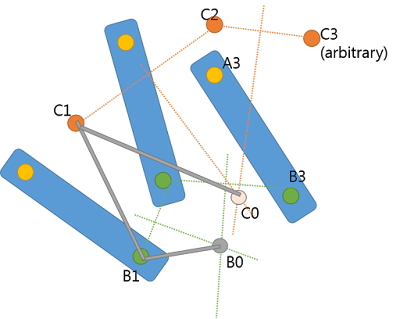
What if we can't set A0 point to one of pivots?
 |
| Fig.2 |
Put an arbitrary point, C3. Make use of kinematic inversion; now, we find C2 and C1.
Similarly, the fixed pivot point C0 is a circumcenter of C1C2C3.
Finally, we can make the 4-bar linkage
C0B0(fixed) - B0B1(input) - B1C1(coupler) - C1C0(follower)
'Mech. ENG' 카테고리의 다른 글
| Propagation of Surface Waves (0) | 2016.05.25 |
|---|---|
| 3 types of wave in fluid mechanics (0) | 2016.05.25 |
| Proof of the symmetry of stress tensor in the fluid element (0) | 2016.03.23 |
| [Mechanism Design] Grashof Criteria (0) | 2015.10.22 |
| [Mechanism Design] 6-bar chain (0) | 2015.10.22 |

